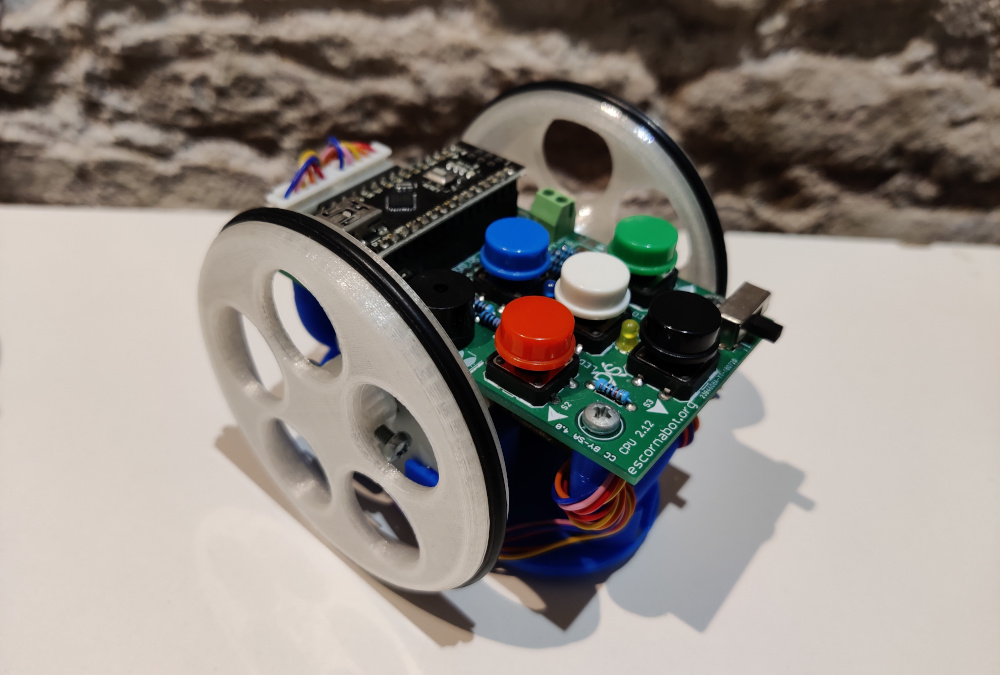
Presentamos uno de nuestros robots favoritos en Niubit, el Escornabot. El nuestro en versión monocasco y recargable.
Introducción
Escornabot es un proyecto de software/hardware libre gallego, que resulta difícilmente superable para introducir a los niños en la robótica.
En Niubit contamos con una legión de estos pequeños robots, como puede verse en este pequeño desfile que estuvo a punto de terminar en catástrofe:
En este artículo vamos a conocer el proyecto así como la versión concreta que nosotros utilizamos.
Proyecto original
Como comentábamos en la introducción, Escornabot es un proyecto libre que existe desde hace bastantes años ya (2014), lo que hace que hayan surgido innumerables variantes y evoluciones del mismo. Esto al principio puede desconcertar un poco a la hora de decidir qué modelo construir, pero la arquitectura básica es tan sencilla que casi con toda seguridad el éxito esta garantizado con cualquiera de ellos.
Consiste en un robot en el que lo único que podemos programar es su desplazamiento, por medio de simples comandos introducidos con una botonera. Las actividades que con ellos se realizan habitualmente consisten en desafíos sobre un tapete o tablero en el que suele haber caminos prefijados u objetivos a alcanzar. Está basado en Arduino al que se le acoplan un par de motores paso a paso con sus correspondientes controladores, un pack de pilas y una botonera. El montaje se puede hacer sobre una breadboard y cables de pin o sobre PCB. Para el chasis, existen varios diseños para imprimir en 3D.
La mejor manera de entender en que consiste es verlo en acción. Aquí un pequeño desafío que planteamos en clase que termina en un pequeño fracaso:
La página oficial del proyecto, donde podemos encontrar la historia, los esquemas y código de varios modelos y contenidos educativos asociados, es: https://escornabot.com/es/
En cuanto a qué modelo construir, nuestro consejo es empezar realizando alguno de los modelos basados en minibreadboard, Arduino Nano y controladores independientes de los motores para así entender bien el funcionamiento del robot. Este montaje se puede enfocar como una actividad en sí misma a realizar con los alumnos. De cara a montar modelos más compactos y fiables, recomendamos utilizar alguna de las variantes de la placa EscornaCPU en su rama 2.x. En el repositorio se encuentran los ficheros Gerber que se pueden enviar a un fabricante de PCBs con los que podemos conseguir 5 de ellas por menos de 2€. También resulta fácil de encontrar PCBs ya fabricadas en venta directa en tiendas de electrónica DIY.
Montaje Niubit
Pasamos a describir el modelo que montamos en nuestra academia que se ha visto en los vídeos anteriores.
El criterio principal para elegir el modelo a utilizar fue que el robot pudiera ser recargable, ya que planteamos montar 15 unidades y no queríamos estar todo el tiempo cambiando pilas (ya que además en el modelo original hay que desmontar una rueda para ello). También nos interesaba que el chasis fuera lo más robusto posible ya que los usuarios habituales de nuestros Escornabots iban a ser niños de corta edad. Esto nos llevó a encontrar un modelo en Thingiverse que consta de un chasis monocasco y tiene previsto el hueco para una batería de Litio tipo 18650.
Realizamos una pequeña modificación sustituyendo los postes donde se inserta la PCB por agujeros para tornillos M3, que creímos conveniente de nuevo al pensar en la edad de los alumnos. También hicimos más grande el hueco donde se insertan los motores, ya que en nuestras impresiones resultaba demasiado ajustado y nos obligaba a utilizar la lima. El resultado puede encontrarse aquí.
En cuanto a la placa, utilizamos la versión 2.12 que monta un Arduino Nano sobre zócalo, ya que teníamos varios de ellos procedentes de Escornabots clásicos que habíamos estado utilizando anteriormente. Para generar los 6V que necesita la placa y gestionar la carga de la batería de Litio utilizamos un sencillo y barato circuito. junto con un breakout de conector microUSB. Prescindimos de todos los componentes necesarios para montar los módulos Wifi o Bluetooth así como la pantalla OLED. Esto hace que no sea necesario instalar el regulador de tensión U6 que se ve en el esquemático, junto a todos sus componentes auxiliares. Básicamente se trata de evitar todo lo que hay en la parte inferior izquierda del esquemático, salvo el buzzer. La lista completa de componentes sería la siguiente:
- 1x Interruptor (SK 12F14)
- 2x Conector JHT (5 pin)
- 1x Conector de bloque 2 pin (3,5mm)
- 2x Tira pin hembra 1x15
- 1x Tira pin macho 1x02 (jumper zumbador)
- 5x Tactile switch 12mm
- 1x Controlador motores paso a paso ULN2803
- 4x Resistencia 1K
- 5x Resistencia 10K
- 1x Resistencia 22K
- 1x LED Rojo 3mm
- 1x LED Azul 3mm
- 1x LED Verde 3mm
- 1x LED Amarillo 3mm
- 1x Condensador 100nF (C2)
- 1x Zumbador pasivo
- 2x Junta tórica para ruedas (63mm)
- 1x Arduino Nano (328P)
- 1x Batería Litio 18650
- 1x Controlador de carga de batería y conversor de corriente a 6V
- 1x Conector microUSB
- 2x Motor paso a paso
- 6x Tornillo M3x10
- 2x Tuerca M3
- 1x PCB 2.12
- 1x STL chasis
- 2x STL ruedas
El resultado es el que puede verse en la foto de cabecera del artículo.
Ejemplo de Actividad para realizar con el Escornabot
Objetivo:
Resolver el algoritmo utilizando la planilla para obtener 3 claves con coordenadas.
Materiales:
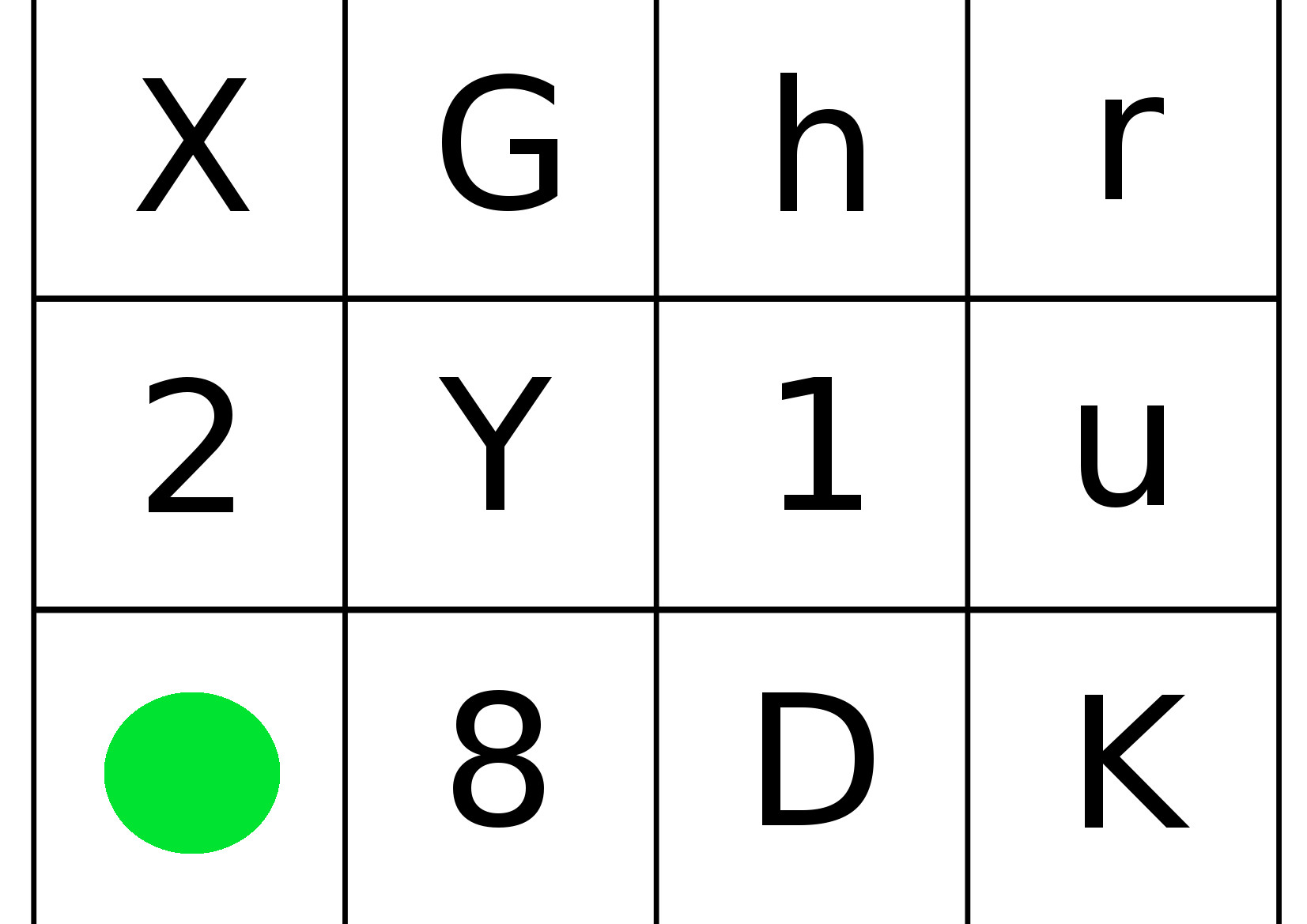
1 planilla escornabot
1 algoritmo de movimiento
1 escornabot
Planilla escornabot:
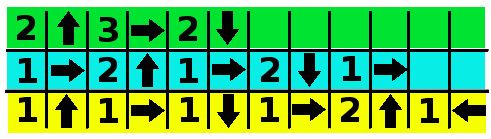
Algoritmo de escornabot:
Procedimiento:
1. El algoritmo contiene 3 claves con las coordenadas de 3 destinos geográficos.
2. Las líneas del algoritmo vienen marcadas en colores distintos (3 líneas).
4. Colocar el escornabot en la casilla verde de salida apuntando hacia arriba y ejecutar cada línea del algoritmo por separado.
5. Apuntar las letras o número que va recorriendo el robot, distinguiendo entre mayúsculas y minúsculas.
6. Cada línea del algoritmo revela una clave de 7 dígitos.
Claves resultantes:
- 2XGhruK
- 8YGh1DK
- 2Y8D1hG
Descodificar las claves:
1. Añadimos el texto "bit.ly/" al inicio de cada código obtenido con el algoritmo.
2. Con el texto resultante obtenemos un enlace a Google maps con un destino.
Solución final:
- bit.ly/2XGhruK -> Doñana
- bit.ly/8YGh1DK -> Santorini
- bit.ly/2Y8D1hG -> Yonaguni
